

旋转气缸加夹爪应用案例——自动化装配线上的零件抓取与放置
一、应用场景
在某大型机械制造企业的自动化装配线上,需要对各种小型零件进行精确的抓取和放置。这些零件形状各异,大小不一,且需要在不同的工位上进行组装。为提高生产效率和质量,企业决定引入旋转气缸加夹爪的自动化解决方案。
二、工作原理
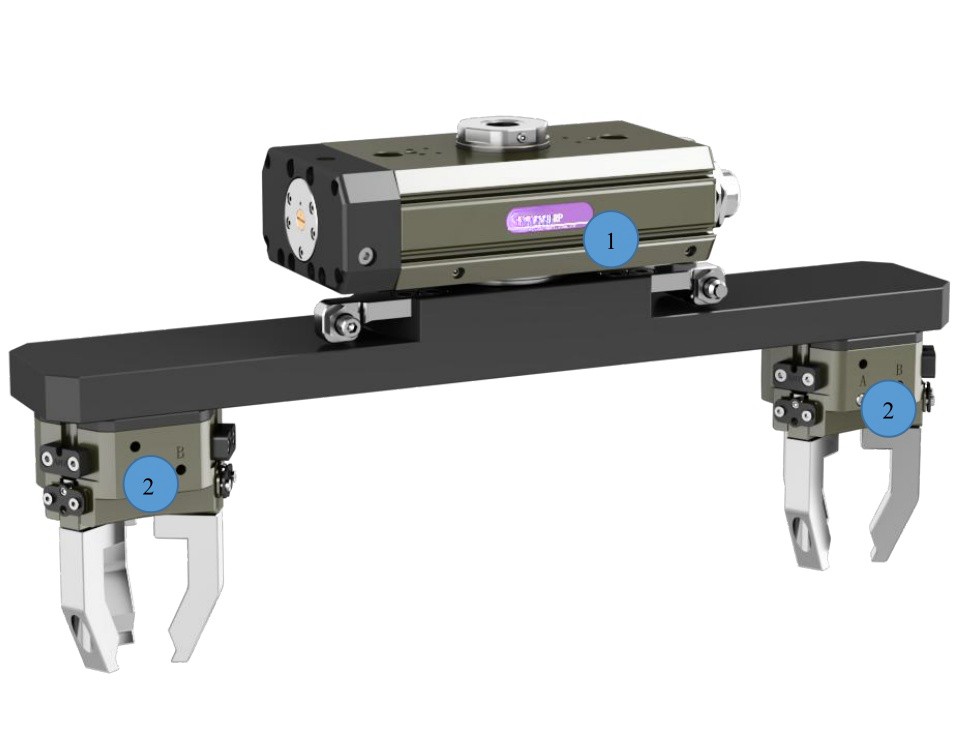
旋转气缸加夹爪的工作原理主要分为三个步骤:
定位与抓取:通过精确的传感器定位待抓取零件的位置,旋转气缸驱动夹爪快速旋转至目标位置。夹爪根据零件的形状和大小自适应调整张合度,稳定抓取零件。
旋转与传输:旋转气缸带动夹爪和零件一起旋转至下一个工位。在此过程中,夹爪始终保持对零件的稳定抓取,确保零件在传输过程中不会掉落或损坏。
放置与释放:到达目标工位后,夹爪在控制系统的精确控制下释放零件,将其准确放置到指定位置。随后,旋转气缸带动夹爪返回初始位置,准备进行下一次抓取。
三、优势特点
高效性:旋转气缸加夹爪的组合实现了零件的快速抓取、旋转和放置,大大提高了生产效率。
精确性:通过精确的传感器和控制系统,夹爪能够准确抓取和放置零件,保证了装配的精确性。
灵活性:夹爪的自适应调整功能使其能够处理不同形状和大小的零件,具有很强的通用性和灵活性。
稳定性:旋转气缸和夹爪的结构设计保证了在高速旋转和传输过程中零件的稳定性,降低了损坏率。
四、实施效果
引入旋转气缸加夹爪的自动化解决方案后,该企业的装配线生产效率提高了30%,同时装配质量也得到了显著提升。由于减少了人工干预,产品的稳定性和一致性也得到了保证。此外,自动化程度的提高还降低了工人的劳动强度,改善了工作环境。
综上所述,旋转气缸加夹爪在自动化装配线上的应用具有显著的优势和效果,对于提高生产效率和产品质量具有重要意义。这一案例对于其他类似场景下的自动化改造也具有一定的参考价值和实用性。
WOMMER机器人末端执行器 欢迎在评论区留言!关注我,我们一起学习一起进步!作者:福州法拉第机电设备有限公司













