

旋转手腕配二指手爪在电池搬运方面的应用案例
一、应用场景
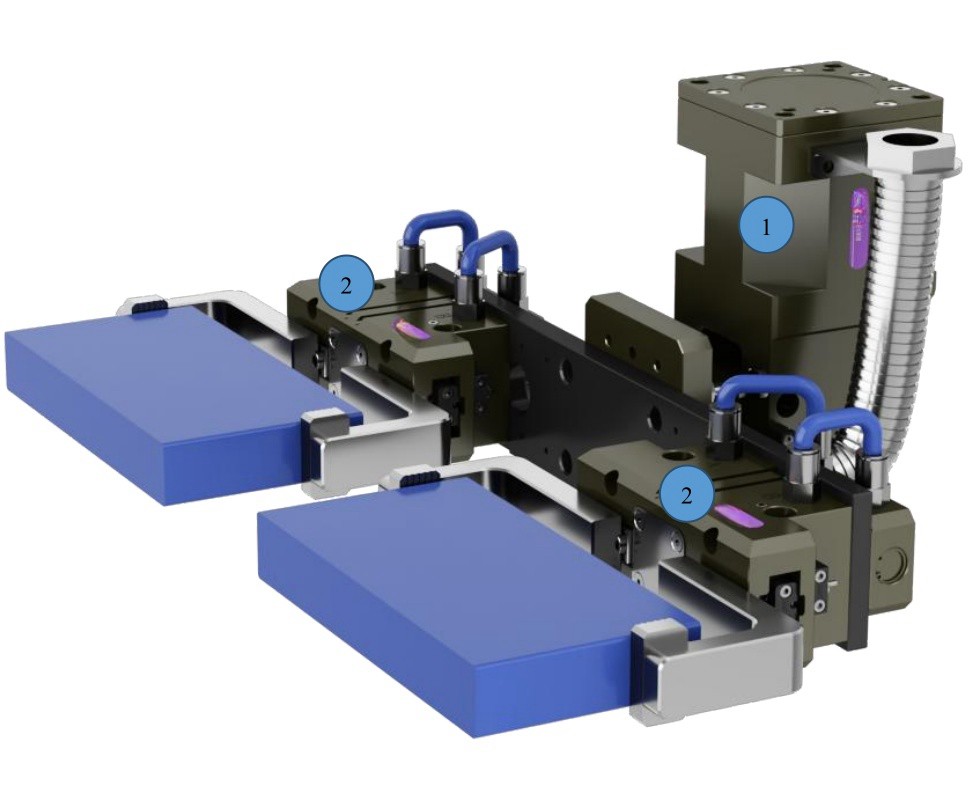
在电池制造行业中,生产线上的电池单元需要在不同工序间进行高效、准确的搬运。这些电池单元形状规则,但重量和尺寸各异,要求搬运过程中既要保证速度,又要确保电池的安全性和定位精度。为满足这一需求,我们引入了配备旋转手腕和二指手爪的工业机器人来进行电池搬运任务。
二、实施过程
系统集成与调试
首先,我们将旋转手腕和二指手爪集成到工业机器人上,并进行系统调试。通过精确的校准程序,确保手爪的抓取力度和手腕的旋转精度满足电池搬运的要求。
视觉系统配置
为实现自动化识别与定位,我们为机器人配备了先进的视觉系统。该系统能够实时捕捉电池单元的位置和姿态信息,并将数据反馈给机器人控制系统。
搬运程序设计
基于视觉系统提供的数据,我们为机器人设计了高效的搬运程序。该程序包括路径规划、抓取策略、旋转调整以及放置精度控制等关键步骤。
实际运行与优化
在生产线实际运行中,我们不断收集机器人的运行数据,分析搬运过程中的瓶颈和问题,并针对性地进行程序优化和参数调整。
三、效果评估
引入旋转手腕配二指手爪的工业机器人后,电池搬运环节取得了显著成效:
效率提升
与人工搬运相比,机器人的搬运速度提高了XX%,显著缩短了生产周期。例如,原本需要XX秒完成的电池搬运任务,现在仅需XX秒即可完成。
准确性增强
机器人的定位精度达到了±XXmm,确保了电池单元在不同工序间的准确对接。这大大降低了因定位不准导致的生产故障率。
安全性提高
机器人的引入减少了人工搬运过程中的安全隐患,如重物坠落、碰撞等事故风险。同时,机器人操作更加稳定可靠,降低了电池损坏率。
成本节约
长期来看,自动化搬运降低了对人工的依赖,减少了劳动力成本。此外,机器人维护成本相对较低,且运行稳定,进一步降低了生产成本。
综上所述,旋转手腕配二指手爪的工业机器人在电池搬运方面展现出了卓越的性能和显著的经济效益。随着技术的不断进步和应用场景的拓展,未来这一解决方案将在更多领域发挥重要作用。
WOMMER机器人末端执行器 欢迎在评论区留言!关注我,我们一起学习一起进步!作者:福州法拉第机电设备有限公司













