

机器人末端夹爪设计方案:实现方形电池的自动化与智能化搬运
随着新能源汽车市场的不断壮大,方形电池作为一种常见的能源储存单元,其生产、搬运与装配过程的自动化和智能化水平日益受到关注。作为机器人工程师,我们为这一挑战提供了一个创新的解决方案:一款专为方形电池设计的机器人末端夹爪。
一、设计理念
本夹爪的设计以“精确、稳定、智能”为核心理念,旨在通过高度集成的传感器和智能算法,实现对方形电池的高效、安全搬运。
二、结构特点
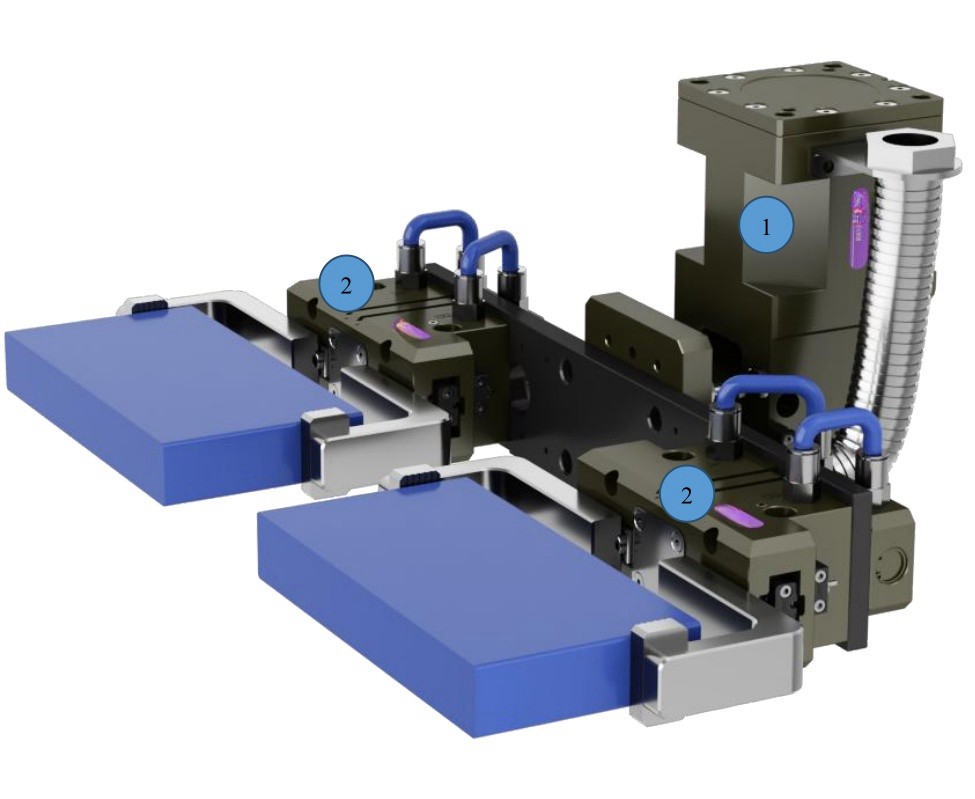
定制化夹持机构:根据方形电池的尺寸和形状,设计专门的夹持机构,确保电池在搬运过程中不会滑落或损伤。
力度感应与控制:夹爪内置力度传感器,可以实时监测夹持力度,并通过反馈机制精确控制夹持力,既避免对电池造成过压损伤,又确保搬运过程中的稳定性。
智能识别系统:集成图像识别和条形码扫描功能,使夹爪能够自动识别不同规格和型号的电池,为后续搬运策略的制定提供数据支持。
三、自动化与智能化实现
自动化搬运流程:通过与上位系统的协同作业,夹爪能够自动接收搬运指令,并按照预设的路径和速度,将电池从起始位置准确搬运到目标位置。
智能路径规划:基于先进的路径规划算法,夹爪能够在复杂环境中自动规划出***搬运路径,有效避免障碍物,提高搬运效率。
实时监控与反馈:夹爪配备多种传感器,实时监控搬运过程中的各项参数,如电池状态、夹持力度、移动速度等,并通过反馈机制及时调整搬运策略,确保搬运过程的安全性和可靠性。
四、结语
这款专为方形电池设计的机器人末端夹爪,以其精确、稳定、智能的特点,完美解决了方形电池在自动化与智能化搬运过程中的种种挑战。它不仅提高了搬运效率,降低了人工成本和出错率,更以其高度集成的智能系统,为新能源汽车产业的发展注入了新的活力。展望未来,我们有理由相信,随着技术的不断进步和创新,这款夹爪将在更多领域展现其卓越的性能和价值。
WOMMER机器人末端执行器 欢迎在评论区留言!关注我,我们一起学习一起进步!作者:福州法拉第机电设备有限公司













