

机器人末端执行器优化方案:三指伺服夹爪的革新之路
在智能制造的浪潮中,机器人技术的不断进步为生产线带来了前所未有的便捷与高效。然而,作为机器人的“手”——末端执行器的性能,往往直接影响着机器人的工作效率和质量。为此,我们提出一项针对机器人末端执行器的全新优化方案,即引入三指伺服夹爪,以突破传统夹爪的限制,实现更高效、更精准的抓取操作。
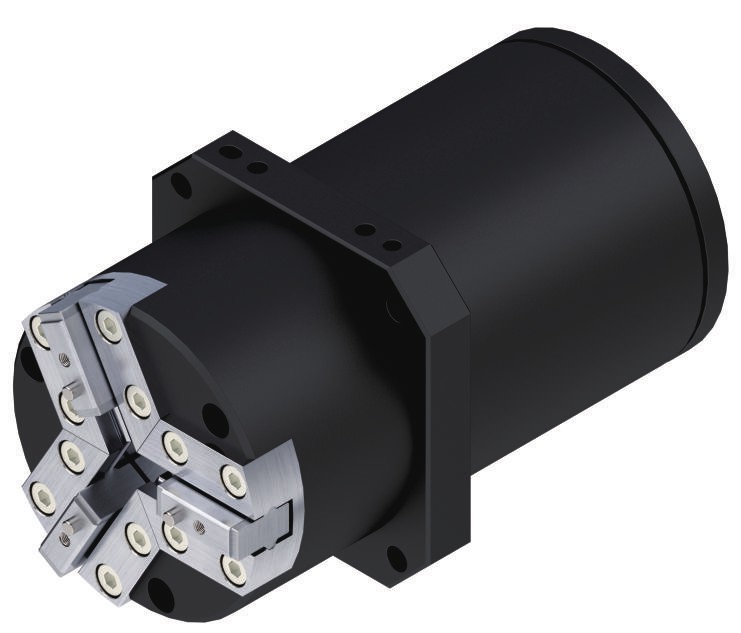
一、三指伺服夹爪的精度革命
传统的两指夹爪在抓取物体时,往往受限于其夹持方式和力度,难以实现对不同形状、大小物体的精准抓取。而三指伺服夹爪,凭借其独特的三指设计,能够更灵活地适应各种形状的物体。通过精确的伺服控制系统,三指可以独立调整位置和力度,从而实现极高的抓取精度。这种设计不仅减少了抓取过程中的误差,还大大提高了生产线上物料的搬运效率和准确性。
二、强大的抓取力度与温柔的操控
在抓取力度方面,三指伺服夹爪同样表现出色。其强大的伺服电机能够提供稳定而可控的抓取力度,确保在抓取重物或易碎物品时既牢固又温柔。这种力度可控性不仅保护了被抓取物体,也延长了夹爪自身的使用寿命。
三、广泛的适用范围
三指伺服夹爪的灵活性还体现在其广泛的适用范围上。无论是大型工件还是小型零件,无论是规则形状还是不规则形状,三指伺服夹爪都能通过调整指间的位置和力度来实现稳定抓取。这种广泛的适用性使得机器人能够轻松应对生产线上的各种抓取需求,大大提高了生产效率和灵活性。
四、智能化集成与易编程性
此外,三指伺服夹爪还具备高度的智能化和易编程性。通过与现代机器人控制系统的无缝集成,夹爪可以轻松地接收并执行来自上位机的指令。同时,其简单的编程接口也使得工程师能够轻松地对夹爪进行编程和调整,以满足不断变化的生产需求。
总结
综上所述,三指伺服夹爪作为一种创新的机器人末端执行器优化方案,不仅提高了抓取精度和力度可控性,还拓宽了适用范围并增强了智能化水平。我们相信,随着这项技术的不断推广和应用,它将在智能制造领域发挥越来越重要的作用,为企业带来更高效、更稳定的生产体验。
WOMMER机器人末端执行器 欢迎在评论区留言!关注我,我们一起学习一起进步!作者:福州法拉第机电设备有限公司













